北京自研全尺寸人形機器人實現(xiàn)技術(shù)突破 擬人奔跑、語音交互與靈巧抓取引領(lǐng)智能機器人新紀(jì)元

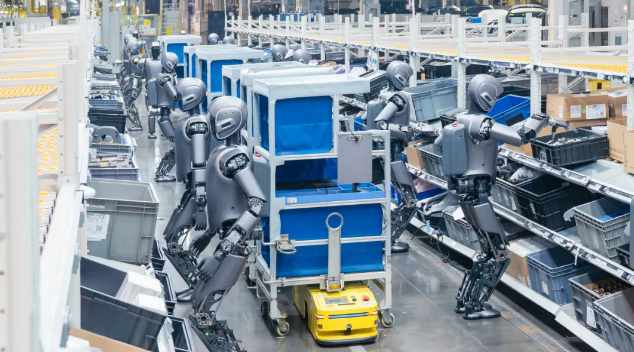
北京科研團隊在智能機器人領(lǐng)域取得重大進展,成功自主研發(fā)出一款具備擬人化奔跑、復(fù)雜環(huán)境語音交互以及精準(zhǔn)抓取能力的全尺寸人形機器人。這一突破標(biāo)志著我國在高動態(tài)運動控制、人工智能感知與靈巧操作等核心技術(shù)上邁入了國際先進行列,為未來服務(wù)、救援、工業(yè)乃至家庭應(yīng)用場景打開了充滿想象力的空間。
這款機器人最引人注目的特點之一是其高度擬人化的奔跑能力。不同于傳統(tǒng)輪式或四足機器人,它采用雙足動態(tài)平衡技術(shù),通過先進的算法實時處理來自全身多傳感器的數(shù)據(jù),模擬人類跑步時重心轉(zhuǎn)移、步態(tài)調(diào)整的動態(tài)過程,實現(xiàn)了在多種地形下的穩(wěn)定、快速移動。這不僅對機械結(jié)構(gòu)、材料強度和能量管理提出了極高要求,更是運動規(guī)劃與控制領(lǐng)域的一次飛躍。
在交互層面,機器人集成了前沿的多模態(tài)感知與自然語言處理系統(tǒng)。它能夠通過麥克風(fēng)陣列精準(zhǔn)定位聲源,在嘈雜環(huán)境中識別并理解人類的語音指令,并通過語音合成進行流暢回應(yīng)。結(jié)合其搭載的視覺傳感器,機器人可以做到“聽其言、觀其行”,實現(xiàn)更具上下文感知的智能交互,例如根據(jù)手勢引導(dǎo)完成后續(xù)任務(wù)。
抓取能力是其實用性的關(guān)鍵。機器人的手部采用了高自由度的靈巧設(shè)計,內(nèi)置觸覺傳感器,配合基于深度學(xué)習(xí)視覺的物體識別與姿態(tài)估計技術(shù),使其能夠?qū)Σ灰?guī)則、易損物品進行自適應(yīng)抓取與操控。從握持工具到抓取水杯,其動作的柔順性與精準(zhǔn)度展現(xiàn)了在復(fù)雜非結(jié)構(gòu)化環(huán)境中完成精細(xì)操作的巨大潛力。
北京此次的研發(fā)成果并非孤立突破,它背后是材料科學(xué)、驅(qū)動技術(shù)、人工智能芯片、實時操作系統(tǒng)等全技術(shù)棧的協(xié)同進步。研發(fā)團隊表示,未來將重點優(yōu)化機器人的能耗、環(huán)境自適應(yīng)能力及群體協(xié)作智能,推動其從實驗室走向?qū)嶋H應(yīng)用。
智能機器人的研發(fā)競賽全球矚目。北京在全尺寸人形機器人領(lǐng)域的這一突破,不僅證明了本土創(chuàng)新體系的實力,也為構(gòu)建“機器人+”生態(tài)、賦能千行百業(yè)奠定了堅實的技術(shù)基石。從工廠車間到家庭客廳,從搶險一線到醫(yī)療康復(fù),一個由智能人形機器人輔助甚至協(xié)作的新時代正加速到來。
如若轉(zhuǎn)載,請注明出處:http://www.silverstrandca.com/product/70.html
更新時間:2026-02-18 16:08:11